Functions to convert between various orientation representations. More...
#include <math.h>#include "sensor_fusion.h"#include "orientation.h"#include "matrix.h"#include "approximations.h"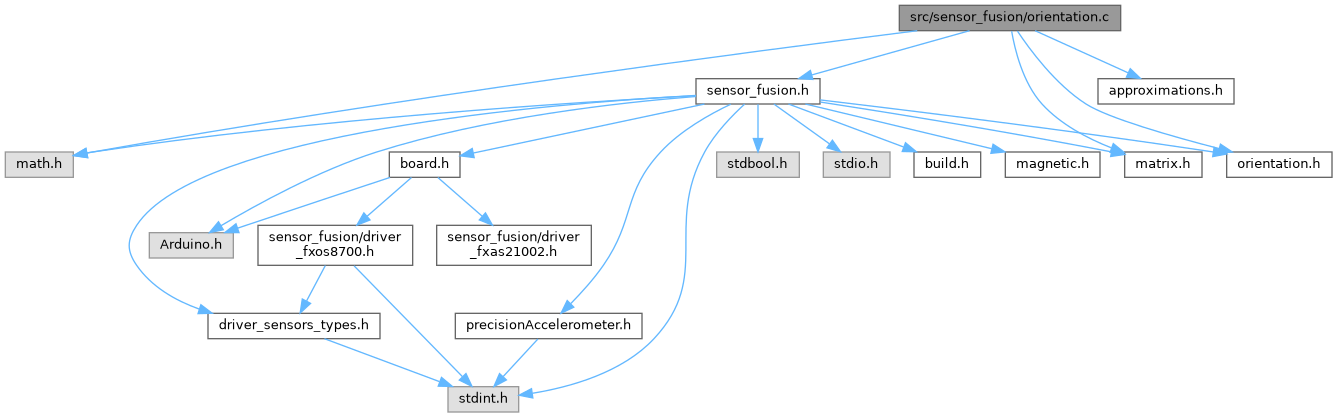
Go to the source code of this file.
Macros | |
| #define | SMALLQ0 1E-4F |
| #define | CORRUPTQUAT 0.001F |
| #define | SMALLMODULUS 0.01F |
Functions | |
| void | f3DOFMagnetometerMatrixNED (float fR[][3], float fBc[]) |
| Aerospace NED magnetometer 3DOF flat eCompass function, computing rotation matrix fR. | |
| void | f3DOFMagnetometerMatrixAndroid (float fR[][3], float fBc[]) |
| Android magnetometer 3DOF flat eCompass function, computing rotation matrix fR. | |
| void | f3DOFMagnetometerMatrixWin8 (float fR[][3], float fBc[]) |
| Windows 8 magnetometer 3DOF flat eCompass function, computing rotation matrix fR. | |
| void | feCompassNED (float fR[][3], float *pfDelta, float *pfsinDelta, float *pfcosDelta, float fBc[], float fGc[], float *pfmodBc, float *pfmodGc) |
| NED: basic 6DOF e-Compass function, computing rotation matrix fR and magnetic inclination angle fDelta. | |
| void | feCompassAndroid (float fR[][3], float *pfDelta, float *pfsinDelta, float *pfcosDelta, float fBc[], float fGc[], float *pfmodBc, float *pfmodGc) |
| Android: basic 6DOF e-Compass function, computing rotation matrix fR and magnetic inclination angle fDelta. | |
| void | feCompassWin8 (float fR[][3], float *pfDelta, float *pfsinDelta, float *pfcosDelta, float fBc[], float fGc[], float *pfmodBc, float *pfmodGc) |
| Win8: basic 6DOF e-Compass function, computing rotation matrix fR and magnetic inclination angle fDelta. | |
| void | fNEDAnglesDegFromRotationMatrix (float R[][3], float *pfPhiDeg, float *pfTheDeg, float *pfPsiDeg, float *pfRhoDeg, float *pfChiDeg) |
| extract the NED angles in degrees from the NED rotation matrix | |
| void | fAndroidAnglesDegFromRotationMatrix (float R[][3], float *pfPhiDeg, float *pfTheDeg, float *pfPsiDeg, float *pfRhoDeg, float *pfChiDeg) |
| extract the Android angles in degrees from the Android rotation matrix | |
| void | fWin8AnglesDegFromRotationMatrix (float R[][3], float *pfPhiDeg, float *pfTheDeg, float *pfPsiDeg, float *pfRhoDeg, float *pfChiDeg) |
| extract the Windows 8 angles in degrees from the Windows 8 rotation matrix | |
| void | fQuaternionFromRotationVectorDeg (Quaternion *pq, const float rvecdeg[], float fscaling) |
| computes normalized rotation quaternion from a rotation vector (deg) | |
| void | fQuaternionFromRotationMatrix (float R[][3], Quaternion *pq) |
| compute the orientation quaternion from a 3x3 rotation matrix | |
| void | fRotationMatrixFromQuaternion (float R[][3], const Quaternion *pq) |
| compute the rotation matrix from an orientation quaternion | |
| void | fRotationVectorDegFromQuaternion (Quaternion *pq, float rvecdeg[]) |
| computes rotation vector (deg) from rotation quaternion | |
| void | fLPFOrientationQuaternion (Quaternion *pq, Quaternion *pLPq, float flpf, float fdeltat, float fOmega[]) |
| function low pass filters an orientation quaternion and computes virtual gyro rotation rate | |
| void | qAeqBxC (Quaternion *pqA, const Quaternion *pqB, const Quaternion *pqC) |
| function compute the quaternion product qB * qC | |
| void | qAeqAxB (Quaternion *pqA, const Quaternion *pqB) |
| function compute the quaternion product qA = qA * qB | |
| Quaternion | qconjgAxB (const Quaternion *pqA, const Quaternion *pqB) |
| function compute the quaternion product conjg(qA) * qB | |
| void | fqAeqNormqA (Quaternion *pqA) |
| function normalizes a rotation quaternion and ensures q0 is non-negative | |
| void | fqAeq1 (Quaternion *pqA) |
| set a quaternion to the unit quaternion | |
| void | fveqconjgquq (Quaternion *pfq, float fu[], float fv[]) |
Detailed Description
Functions to convert between various orientation representations.
Functions to convert between various orientation representations. Also includes functions for manipulating quaternions.
Definition in file orientation.c.
Macro Definition Documentation
◆ CORRUPTQUAT
| #define CORRUPTQUAT 0.001F |
Definition at line 31 of file orientation.c.
◆ SMALLMODULUS
| #define SMALLMODULUS 0.01F |
Definition at line 32 of file orientation.c.
◆ SMALLQ0
| #define SMALLQ0 1E-4F |
Definition at line 30 of file orientation.c.
Function Documentation
◆ f3DOFMagnetometerMatrixAndroid()
| void f3DOFMagnetometerMatrixAndroid | ( | float | fR[][3], |
| float | fBc[] | ||
| ) |
Android magnetometer 3DOF flat eCompass function, computing rotation matrix fR.
- Parameters
-
fR computed rotation matrix (output) fBc calibrated magnetometer reading (input)
Definition at line 224 of file orientation.c.
◆ f3DOFMagnetometerMatrixNED()
| void f3DOFMagnetometerMatrixNED | ( | float | fR[][3], |
| float | fBc[] | ||
| ) |
Aerospace NED magnetometer 3DOF flat eCompass function, computing rotation matrix fR.
- Parameters
-
fR computed rotation matrix (output) fBc calibrated magnetometer reading (input)
Definition at line 194 of file orientation.c.
◆ f3DOFMagnetometerMatrixWin8()
| void f3DOFMagnetometerMatrixWin8 | ( | float | fR[][3], |
| float | fBc[] | ||
| ) |
Windows 8 magnetometer 3DOF flat eCompass function, computing rotation matrix fR.
- Parameters
-
fR computed rotation matrix (output) fBc calibrated magnetometer reading (input)
Definition at line 254 of file orientation.c.
◆ fAndroidAnglesDegFromRotationMatrix()
| void fAndroidAnglesDegFromRotationMatrix | ( | float | R[][3], |
| float * | pfPhiDeg, | ||
| float * | pfTheDeg, | ||
| float * | pfPsiDeg, | ||
| float * | pfRhoDeg, | ||
| float * | pfChiDeg | ||
| ) |
extract the Android angles in degrees from the Android rotation matrix
- Parameters
-
R rotation matrix input pfPhiDeg the roll angle -90.0 <= Phi <= 90.0 deg pfTheDeg the pitch angle -180.0 <= The < 180.0 deg pfPsiDeg yaw angle Psi with range 0.0 <= Psi < 360.0 deg pfRhoDeg the compass heading angle Rho equals the yaw angle Psi pfChiDeg the tilt angle from vertical Chi (0 <= Chi <= 180 deg)
Definition at line 543 of file orientation.c.
◆ feCompassAndroid()
| void feCompassAndroid | ( | float | fR[][3], |
| float * | pfDelta, | ||
| float * | pfsinDelta, | ||
| float * | pfcosDelta, | ||
| float | fBc[], | ||
| float | fGc[], | ||
| float * | pfmodBc, | ||
| float * | pfmodGc | ||
| ) |
Android: basic 6DOF e-Compass function, computing rotation matrix fR and magnetic inclination angle fDelta.
- Parameters
-
fR computed rotation matrix (output) pfDelta magnetic inclination angle (output) pfsinDelta sin of the inclination angle pfcosDelta cos of the inclination angle fBc calibrated magnetometer reading (input) fGc calibrated accelerometer input vector (input) pfmodBc modulus of the calibrated magnetic vector pfmodGc modulus of the calibrated accelerometer vector
Definition at line 338 of file orientation.c.
◆ feCompassNED()
| void feCompassNED | ( | float | fR[][3], |
| float * | pfDelta, | ||
| float * | pfsinDelta, | ||
| float * | pfcosDelta, | ||
| float | fBc[], | ||
| float | fGc[], | ||
| float * | pfmodBc, | ||
| float * | pfmodGc | ||
| ) |
NED: basic 6DOF e-Compass function, computing rotation matrix fR and magnetic inclination angle fDelta.
- Parameters
-
fR computed rotation matrix (output) pfDelta magnetic inclination angle (output) pfsinDelta sin of the inclination angle pfcosDelta cos of the inclination angle fBc calibrated magnetometer vector (input) fGc calibrated accelerometer input vector (input) pfmodBc modulus of the calibrated magnetic vector pfmodGc modulus of the calibrated accelerometer vector
Definition at line 265 of file orientation.c.
◆ feCompassWin8()
| void feCompassWin8 | ( | float | fR[][3], |
| float * | pfDelta, | ||
| float * | pfsinDelta, | ||
| float * | pfcosDelta, | ||
| float | fBc[], | ||
| float | fGc[], | ||
| float * | pfmodBc, | ||
| float * | pfmodGc | ||
| ) |
Win8: basic 6DOF e-Compass function, computing rotation matrix fR and magnetic inclination angle fDelta.
- Parameters
-
fR computed rotation matrix (output) pfDelta magnetic inclination angle (output) pfsinDelta sin of the inclination angle pfcosDelta cos of the inclination angle fBc calibrated magnetometer reading (input) fGc calibrated accelerometer input vector (input) pfmodBc modulus of the calibrated magnetic vector pfmodGc modulus of the calibrated accelerometer vector
Definition at line 412 of file orientation.c.
◆ fLPFOrientationQuaternion()
| void fLPFOrientationQuaternion | ( | Quaternion * | pq, |
| Quaternion * | pLPq, | ||
| float | flpf, | ||
| float | fdeltat, | ||
| float | fOmega[] | ||
| ) |
function low pass filters an orientation quaternion and computes virtual gyro rotation rate
Definition at line 891 of file orientation.c.
◆ fNEDAnglesDegFromRotationMatrix()
| void fNEDAnglesDegFromRotationMatrix | ( | float | R[][3], |
| float * | pfPhiDeg, | ||
| float * | pfTheDeg, | ||
| float * | pfPsiDeg, | ||
| float * | pfRhoDeg, | ||
| float * | pfChiDeg | ||
| ) |
extract the NED angles in degrees from the NED rotation matrix
- Parameters
-
R rotation matrix input pfPhiDeg output: the roll angle range -180.0 <= Phi < 180.0 deg pfTheDeg output: the pitch angle -90.0 <= Theta <= 90.0 deg pfPsiDeg output: the yaw (compass) angle 0.0 <= Psi < 360.0 deg pfRhoDeg output: For NED, the compass heading Rho equals the yaw angle Psi pfChiDeg output: the tilt angle from vertical Chi (0 <= Chi <= 180 deg)
Definition at line 487 of file orientation.c.
◆ fqAeq1()
| void fqAeq1 | ( | Quaternion * | pqA | ) |
set a quaternion to the unit quaternion
Definition at line 1013 of file orientation.c.
◆ fqAeqNormqA()
| void fqAeqNormqA | ( | Quaternion * | pqA | ) |
function normalizes a rotation quaternion and ensures q0 is non-negative
Definition at line 978 of file orientation.c.
◆ fQuaternionFromRotationMatrix()
| void fQuaternionFromRotationMatrix | ( | float | R[][3], |
| Quaternion * | pq | ||
| ) |
compute the orientation quaternion from a 3x3 rotation matrix
- Parameters
-
R Rotation matrix (input) pq Quaternion (output)
Definition at line 760 of file orientation.c.
◆ fQuaternionFromRotationVectorDeg()
| void fQuaternionFromRotationVectorDeg | ( | Quaternion * | pq, |
| const float | rvecdeg[], | ||
| float | fscaling | ||
| ) |
computes normalized rotation quaternion from a rotation vector (deg)
- Parameters
-
pq quaternion (output) rvecdeg rotation vector in degrees fscaling delta Time
Definition at line 692 of file orientation.c.
◆ fRotationMatrixFromQuaternion()
| void fRotationMatrixFromQuaternion | ( | float | R[][3], |
| const Quaternion * | pq | ||
| ) |
compute the rotation matrix from an orientation quaternion
- Parameters
-
R Rotation matrix (output) pq Quaternion (input)
Definition at line 801 of file orientation.c.
◆ fRotationVectorDegFromQuaternion()
| void fRotationVectorDegFromQuaternion | ( | Quaternion * | pq, |
| float | rvecdeg[] | ||
| ) |
computes rotation vector (deg) from rotation quaternion
- Parameters
-
pq quaternion (input) rvecdeg rotation vector in degrees (output)
Definition at line 841 of file orientation.c.
◆ fveqconjgquq()
| void fveqconjgquq | ( | Quaternion * | pfq, |
| float | fu[], | ||
| float | fv[] | ||
| ) |
function computes the rotation quaternion that rotates unit vector u onto unit vector v as v=q*.u.q using q = 1/sqrt(2) * {sqrt(1 + u.v) - u x v / sqrt(1 + u.v)}
Definition at line 1023 of file orientation.c.
◆ fWin8AnglesDegFromRotationMatrix()
| void fWin8AnglesDegFromRotationMatrix | ( | float | R[][3], |
| float * | pfPhiDeg, | ||
| float * | pfTheDeg, | ||
| float * | pfPsiDeg, | ||
| float * | pfRhoDeg, | ||
| float * | pfChiDeg | ||
| ) |
extract the Windows 8 angles in degrees from the Windows 8 rotation matrix
- Parameters
-
R rotation matrix input pfPhiDeg the roll angle -90.0 <= Phi <= 90.0 deg pfTheDeg pitch angle Theta in the range -180.0 <= The < 180.0 deg pfPsiDeg yaw angle Psi in range 0.0 <= Psi < 360.0 deg pfRhoDeg the compass angle Rho = 360 - Psi pfChiDeg tilt angle from vertical Chi (0 <= Chi <= 180 deg)
Definition at line 600 of file orientation.c.
◆ qAeqAxB()
| void qAeqAxB | ( | Quaternion * | pqA, |
| const Quaternion * | pqB | ||
| ) |
function compute the quaternion product qA = qA * qB
Definition at line 948 of file orientation.c.
◆ qAeqBxC()
| void qAeqBxC | ( | Quaternion * | pqA, |
| const Quaternion * | pqB, | ||
| const Quaternion * | pqC | ||
| ) |
function compute the quaternion product qB * qC
Definition at line 937 of file orientation.c.
◆ qconjgAxB()
| Quaternion qconjgAxB | ( | const Quaternion * | pqA, |
| const Quaternion * | pqB | ||
| ) |
function compute the quaternion product conjg(qA) * qB
Definition at line 965 of file orientation.c.