An easy-to-use interface to the NXP Sensor Fusion version 7 library algorithms. More...
#include "sensor_fusion_class.h"#include <Stream.h>#include <stdint.h>#include "sensor_fusion/sensor_fusion.h"#include "sensor_fusion/control.h"#include "sensor_fusion/driver_sensors.h"#include "sensor_fusion/status.h"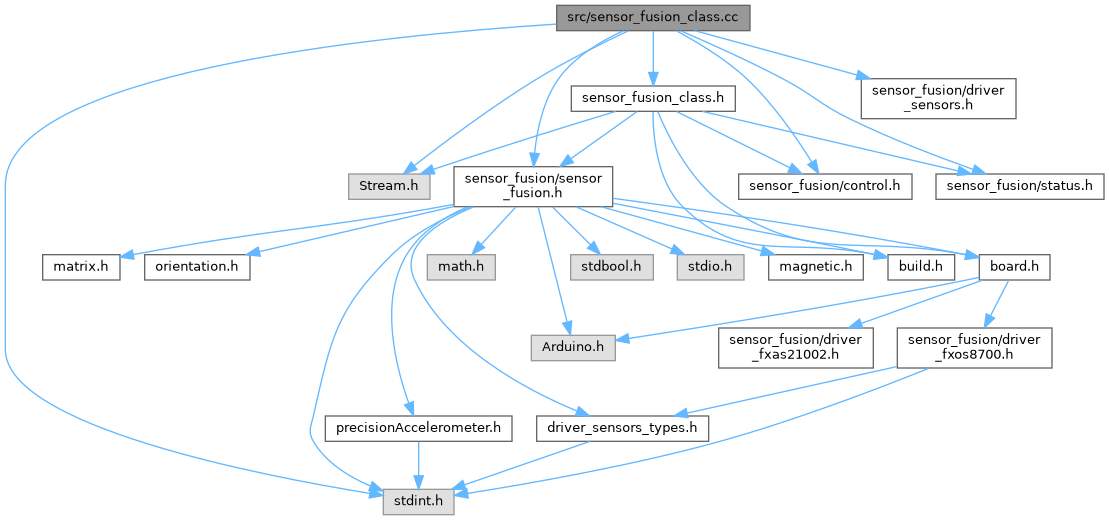
Go to the source code of this file.
Variables | |
| const float | kDegToRads = PI / 180.0 |
| To convert Degrees to Radians, multiply by this constant. | |
| const float | kCelsiusToKelvin = 273.15 |
| To convert degrees C to K, add this constant. | |
| const float | kGeesToMPerSS = 9.80665 |
| To convert acceleration in G to m/s^2, multiply by this constant. | |
Detailed Description
An easy-to-use interface to the NXP Sensor Fusion version 7 library algorithms.
It is configured to work with the Adafruit breakout board #3643 using the NXP FXOS8700 magnetometer/accelerometer and FXAS21002 gyroscope sensor ICs, but can be modified to work with other sensors having an I2C interface. With additional modification, it can also work with SPI interface sensors.
A C++ class provides simple access to the most common sensor fusion functions, but it is also possible to directly interface with the library methods contained in the underlying C files, which are based on those provided by NXP in their version 7.20 release.
Definition in file sensor_fusion_class.cc.
Variable Documentation
◆ kCelsiusToKelvin
| const float kCelsiusToKelvin = 273.15 |
To convert degrees C to K, add this constant.
Definition at line 37 of file sensor_fusion_class.cc.
◆ kDegToRads
| const float kDegToRads = PI / 180.0 |
To convert Degrees to Radians, multiply by this constant.
Definition at line 36 of file sensor_fusion_class.cc.
◆ kGeesToMPerSS
| const float kGeesToMPerSS = 9.80665 |
To convert acceleration in G to m/s^2, multiply by this constant.
Definition at line 38 of file sensor_fusion_class.cc.