The sensor_fusion.h file implements the top level programming interface. More...
#include <Arduino.h>#include <math.h>#include <stdbool.h>#include <stdint.h>#include <stdio.h>#include "board.h"#include "build.h"#include "driver_sensors_types.h"#include "magnetic.h"#include "matrix.h"#include "orientation.h"#include "precisionAccelerometer.h"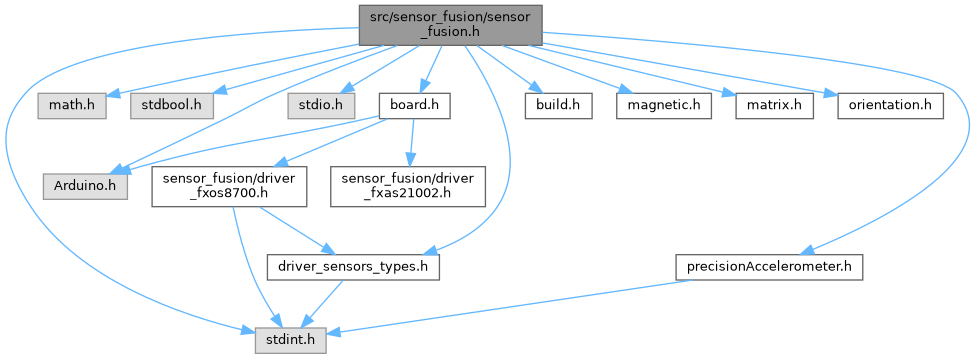

Go to the source code of this file.
Classes | |
| struct | PhysicalSensor |
| An instance of PhysicalSensor structure type should be allocated for each physical sensors (combo devices = 1) More... | |
| struct | PressureSensor |
| The PressureSensor structure stores raw and processed measurements for an altimeter. More... | |
| struct | AccelSensor |
| The AccelSensor structure stores raw and processed measurements for a 3-axis accelerometer. More... | |
| struct | MagSensor |
| The MagSensor structure stores raw and processed measurements for a 3-axis magnetic sensor. More... | |
| struct | TempSensor |
| The TempSensor structure stores raw temperature readings. More... | |
| struct | GyroSensor |
| The GyroSensor structure stores raw and processed measurements for a 3-axis gyroscope. More... | |
| union | FifoSensor |
| The FifoSensor union allows us to use common pointers for Accel, Mag & Gyro logical sensor structures. More... | |
| struct | SV_1DOF_P_BASIC |
| The SV_1DOF_P_BASIC structure contains state information for a pressure sensor/altimeter. More... | |
| struct | SV_3DOF_G_BASIC |
| This is the 3DOF basic accelerometer state vector structure. More... | |
| struct | SV_3DOF_B_BASIC |
| This is the 3DOF basic magnetometer state vector structure/. More... | |
| struct | SV_3DOF_Y_BASIC |
| SV_3DOF_Y_BASIC structure is the 3DOF basic gyroscope state vector structure. More... | |
| struct | SV_6DOF_GB_BASIC |
| SV_6DOF_GB_BASIC is the 6DOF basic accelerometer and magnetometer state vector structure. More... | |
| struct | SV_6DOF_GY_KALMAN |
| SV_6DOF_GY_KALMAN is the 6DOF Kalman filter accelerometer and gyroscope state vector structure. More... | |
| struct | SV_9DOF_GBY_KALMAN |
| SV_9DOF_GBY_KALMAN is the 9DOF Kalman filter accelerometer, magnetometer and gyroscope state vector structure. More... | |
| struct | SV_COMMON |
| struct | SensorFusionGlobals |
| The top level fusion structure. More... | |
Macros | |
| #define | true 1 |
| Boolean TRUE. | |
| #define | false 0 |
| Boolean FALSE. | |
Vector Components | |
Index values for accessing vector terms | |
| #define | CHX 0 |
| Used to access X-channel entries in various data data structures. | |
| #define | CHY 1 |
| Used to access Y-channel entries in various data data structures. | |
| #define | CHZ 2 |
| Used to access Z-channel entries in various data data structures. | |
Math Constants | |
useful multiplicative conversion constants | |
| #define | PI 3.141592654F |
| pi (it is also defined in Arduino.h) | |
| #define | PIOVER2 1.570796327F |
| pi / 2 | |
| #define | FPIOVER180 0.01745329251994F |
| degrees to radians conversion = pi / 180 | |
| #define | F180OVERPI 57.2957795130823F |
| radians to degrees conversion = 180 / pi | |
| #define | F180OVERPISQ 3282.8063500117F |
| square of F180OVERPI | |
| #define | ONETHIRD 0.33333333F |
| one third | |
| #define | ONESIXTH 0.166666667F |
| one sixth | |
| #define | ONESIXTEENTH 0.0625F |
| one sixteenth | |
| #define | ONEOVER12 0.083333333F |
| 1 / 12 | |
| #define | ONEOVER48 0.02083333333F |
| 1 / 48 | |
| #define | ONEOVER120 0.0083333333F |
| 1 / 120 | |
| #define | ONEOVER3840 0.0002604166667F |
| 1 / 3840 | |
| #define | ONEOVERSQRT2 0.707106781F |
| 1/sqrt(2) | |
| #define | SQRT15OVER4 0.968245837F |
| sqrt(15)/4 | |
| #define | GTOMSEC2 9.80665 |
| standard gravity in m/s2 | |
Typedefs | |
| typedef enum quaternion | quaternion_type |
| the quaternion type to be transmitted | |
| typedef int8_t() | initializeSensor_t(struct PhysicalSensor *sensor, struct SensorFusionGlobals *sfg) |
| typedef int8_t() | readSensor_t(struct PhysicalSensor *sensor, struct SensorFusionGlobals *sfg) |
| typedef int8_t() | readSensors_t(struct SensorFusionGlobals *sfg, uint8_t read_loop_counter) |
| typedef int8_t() | installSensor_t(struct SensorFusionGlobals *sfg, struct PhysicalSensor *sensor, uint16_t addr, uint16_t schedule, registerDeviceInfo_t *busInfo, initializeSensor_t *initialize, readSensor_t *read) |
| typedef void() | initializeFusionEngine_t(struct SensorFusionGlobals *sfg, int pin_i2c_sda1, int pin_i2c_scl) |
| typedef void() | runFusion_t(struct SensorFusionGlobals *sfg) |
| typedef void() | clearFIFOs_t(struct SensorFusionGlobals *sfg) |
| typedef void() | conditionSensorReadings_t(struct SensorFusionGlobals *sfg) |
| typedef void() | applyPerturbation_t(struct SensorFusionGlobals *sfg) |
| typedef void() | setStatus_t(struct SensorFusionGlobals *sfg, fusion_status_t status) |
| typedef fusion_status_t() | getStatus_t(struct SensorFusionGlobals *sfg) |
| typedef void() | updateStatus_t(struct SensorFusionGlobals *sfg) |
| typedef void() | ssSetStatus_t(struct StatusSubsystem *pStatus, fusion_status_t status) |
| typedef fusion_status_t() | ssGetStatus_t(struct StatusSubsystem *pStatus) |
| typedef void() | ssUpdateStatus_t(struct StatusSubsystem *pStatus) |
| typedef struct SV_COMMON * | SV_ptr |
| typedef struct SensorFusionGlobals | SensorFusionGlobals |
| The top level fusion structure. | |
Enumerations | |
| enum | quaternion { Q3 , Q3M , Q3G , Q6MA , Q6AG , Q9 } |
| the quaternion type to be transmitted More... | |
| enum | fusion_status_t { OFF , INITIALIZING , LOWPOWER , NORMAL , RECEIVING_WIRED , RECEIVING_WIRELESS , HARD_FAULT , SOFT_FAULT } |
| Application-specific serial communications system. More... | |
Functions | |
| void | initSensorFusionGlobals (SensorFusionGlobals *sfg, struct StatusSubsystem *pStatusSubsystem, struct ControlSubsystem *pControlSubsystem) |
| utility function to insert default values in the top level structure | |
| void | conditionSensorReadings (SensorFusionGlobals *sfg) |
| void | clearFIFOs (SensorFusionGlobals *sfg) |
| Function to clear FIFO at the end of each fusion computation. | |
| void | zeroArray (struct StatusSubsystem *pStatus, void *data, uint16_t size, uint16_t numElements, uint8_t check) |
| void | conditionSample (int16_t sample[3]) |
| conditionSample ensures that we never encounter the maximum negative two's complement value for a 16-bit variable (-32768). | |
| void | addToFifo (union FifoSensor *sensor, uint16_t maxFifoSize, int16_t sample[3]) |
| addToFifo is called from within sensor driver read functions | |
| void | ApplyAccelHAL (struct AccelSensor *Accel) |
| Apply the accelerometer Hardware Abstraction Layer. | |
| void | ApplyMagHAL (struct MagSensor *Mag) |
| Apply the magnetometer Hardware Abstraction Layer. | |
| void | ApplyGyroHAL (struct GyroSensor *Gyro) |
| Apply the gyroscope Hardware Abstraction Layer. | |
Variables | |
| installSensor_t | installSensor |
| initializeFusionEngine_t | initializeFusionEngine |
| runFusion_t | runFusion |
| readSensors_t | readSensors |
| applyPerturbation_t | ApplyPerturbation |
| ApplyPerturbation is a reverse unit-step test function. | |
Detailed Description
The sensor_fusion.h file implements the top level programming interface.
Definition in file sensor_fusion.h.
Macro Definition Documentation
◆ CHX
| #define CHX 0 |
Used to access X-channel entries in various data data structures.
Definition at line 54 of file sensor_fusion.h.
◆ CHY
| #define CHY 1 |
Used to access Y-channel entries in various data data structures.
Definition at line 55 of file sensor_fusion.h.
◆ CHZ
| #define CHZ 2 |
Used to access Z-channel entries in various data data structures.
Definition at line 56 of file sensor_fusion.h.
◆ F180OVERPI
| #define F180OVERPI 57.2957795130823F |
radians to degrees conversion = 180 / pi
Definition at line 84 of file sensor_fusion.h.
◆ F180OVERPISQ
| #define F180OVERPISQ 3282.8063500117F |
square of F180OVERPI
Definition at line 85 of file sensor_fusion.h.
◆ false
| #define false 0 |
Boolean FALSE.
Definition at line 64 of file sensor_fusion.h.
◆ FPIOVER180
| #define FPIOVER180 0.01745329251994F |
degrees to radians conversion = pi / 180
Definition at line 83 of file sensor_fusion.h.
◆ GTOMSEC2
| #define GTOMSEC2 9.80665 |
standard gravity in m/s2
Definition at line 95 of file sensor_fusion.h.
◆ ONEOVER12
| #define ONEOVER12 0.083333333F |
1 / 12
Definition at line 89 of file sensor_fusion.h.
◆ ONEOVER120
| #define ONEOVER120 0.0083333333F |
1 / 120
Definition at line 91 of file sensor_fusion.h.
◆ ONEOVER3840
| #define ONEOVER3840 0.0002604166667F |
1 / 3840
Definition at line 92 of file sensor_fusion.h.
◆ ONEOVER48
| #define ONEOVER48 0.02083333333F |
1 / 48
Definition at line 90 of file sensor_fusion.h.
◆ ONEOVERSQRT2
| #define ONEOVERSQRT2 0.707106781F |
1/sqrt(2)
Definition at line 93 of file sensor_fusion.h.
◆ ONESIXTEENTH
| #define ONESIXTEENTH 0.0625F |
one sixteenth
Definition at line 88 of file sensor_fusion.h.
◆ ONESIXTH
| #define ONESIXTH 0.166666667F |
one sixth
Definition at line 87 of file sensor_fusion.h.
◆ ONETHIRD
| #define ONETHIRD 0.33333333F |
one third
Definition at line 86 of file sensor_fusion.h.
◆ PI
| #define PI 3.141592654F |
pi (it is also defined in Arduino.h)
Definition at line 80 of file sensor_fusion.h.
◆ PIOVER2
| #define PIOVER2 1.570796327F |
pi / 2
Definition at line 82 of file sensor_fusion.h.
◆ SQRT15OVER4
| #define SQRT15OVER4 0.968245837F |
sqrt(15)/4
Definition at line 94 of file sensor_fusion.h.
◆ true
| #define true 1 |
Boolean TRUE.
Definition at line 61 of file sensor_fusion.h.
Typedef Documentation
◆ applyPerturbation_t
| typedef void() applyPerturbation_t(struct SensorFusionGlobals *sfg) |
Definition at line 142 of file sensor_fusion.h.
◆ clearFIFOs_t
| typedef void() clearFIFOs_t(struct SensorFusionGlobals *sfg) |
Definition at line 140 of file sensor_fusion.h.
◆ conditionSensorReadings_t
| typedef void() conditionSensorReadings_t(struct SensorFusionGlobals *sfg) |
Definition at line 141 of file sensor_fusion.h.
◆ getStatus_t
| typedef fusion_status_t() getStatus_t(struct SensorFusionGlobals *sfg) |
Definition at line 144 of file sensor_fusion.h.
◆ initializeFusionEngine_t
| typedef void() initializeFusionEngine_t(struct SensorFusionGlobals *sfg, int pin_i2c_sda1, int pin_i2c_scl) |
Definition at line 138 of file sensor_fusion.h.
◆ initializeSensor_t
| typedef int8_t() initializeSensor_t(struct PhysicalSensor *sensor, struct SensorFusionGlobals *sfg) |
Definition at line 116 of file sensor_fusion.h.
◆ installSensor_t
| typedef int8_t() installSensor_t(struct SensorFusionGlobals *sfg, struct PhysicalSensor *sensor, uint16_t addr, uint16_t schedule, registerDeviceInfo_t *busInfo, initializeSensor_t *initialize, readSensor_t *read) |
- Parameters
-
sfg Global data structure pointer sensor SF Structure to store sensor configuration addr I2C address or SPI_ADDR schedule Specifies sampling interval busInfo information required for bus power management initialize SF Sensor Initialization Function pointer read SF Sensor Read Function pointer
Definition at line 128 of file sensor_fusion.h.
◆ readSensor_t
| typedef int8_t() readSensor_t(struct PhysicalSensor *sensor, struct SensorFusionGlobals *sfg) |
Definition at line 120 of file sensor_fusion.h.
◆ readSensors_t
| typedef int8_t() readSensors_t(struct SensorFusionGlobals *sfg, uint8_t read_loop_counter) |
Definition at line 124 of file sensor_fusion.h.
◆ runFusion_t
| typedef void() runFusion_t(struct SensorFusionGlobals *sfg) |
Definition at line 139 of file sensor_fusion.h.
◆ SensorFusionGlobals
| typedef struct SensorFusionGlobals SensorFusionGlobals |
The top level fusion structure.
The top level fusion structure grows/shrinks based upon flag definitions contained in build.h. These same flags will populate the .iFlags field for run-time access.
◆ setStatus_t
| typedef void() setStatus_t(struct SensorFusionGlobals *sfg, fusion_status_t status) |
Definition at line 143 of file sensor_fusion.h.
◆ ssGetStatus_t
| typedef fusion_status_t() ssGetStatus_t(struct StatusSubsystem *pStatus) |
Definition at line 147 of file sensor_fusion.h.
◆ ssSetStatus_t
| typedef void() ssSetStatus_t(struct StatusSubsystem *pStatus, fusion_status_t status) |
Definition at line 146 of file sensor_fusion.h.
◆ ssUpdateStatus_t
| typedef void() ssUpdateStatus_t(struct StatusSubsystem *pStatus) |
Definition at line 148 of file sensor_fusion.h.
◆ SV_ptr
Definition at line 453 of file sensor_fusion.h.
◆ updateStatus_t
| typedef void() updateStatus_t(struct SensorFusionGlobals *sfg) |
Definition at line 145 of file sensor_fusion.h.
Enumeration Type Documentation
◆ fusion_status_t
| enum fusion_status_t |
Application-specific serial communications system.
Definition at line 104 of file sensor_fusion.h.
◆ quaternion
| enum quaternion |
the quaternion type to be transmitted
| Enumerator | |
|---|---|
| Q3 | Quaternion derived from 3-axis accel (tilt) |
| Q3M | Quaternion derived from 3-axis mag only (auto compass algorithm) |
| Q3G | Quaternion derived from 3-axis gyro only (rotation) |
| Q6MA | Quaternion derived from 3-axis accel + 3 axis mag (eCompass) |
| Q6AG | Quaternion derived from 3-axis accel + 3-axis gyro (gaming) |
| Q9 | Quaternion derived from full 9-axis sensor fusion. |
Definition at line 42 of file sensor_fusion.h.
Function Documentation
◆ addToFifo()
| void addToFifo | ( | union FifoSensor * | sensor, |
| uint16_t | maxFifoSize, | ||
| int16_t | sample[3] | ||
| ) |
addToFifo is called from within sensor driver read functions
addToFifo is called from within sensor driver read functions to transfer new readings into the sensor structure corresponding to accel, gyro or mag. This function ensures that the software FIFOs are not overrun.
example usage: if (status==SENSOR_ERROR_NONE) addToFifo((FifoSensor*) &(sfg->Mag), MAG_FIFO_SIZE, sample);
- Parameters
-
sensor pointer to structure of type AccelSensor, MagSensor or GyroSensor maxFifoSize the size of the software (not hardware) FIFO sample the sample to add
Definition at line 560 of file sensor_fusion.c.
◆ ApplyAccelHAL()
| void ApplyAccelHAL | ( | struct AccelSensor * | Accel | ) |
Apply the accelerometer Hardware Abstraction Layer.
- Parameters
-
Accel pointer to accelerometer logical sensor
Definition at line 58 of file hal_axis_remap.c.
◆ ApplyGyroHAL()
| void ApplyGyroHAL | ( | struct GyroSensor * | Gyro | ) |
Apply the gyroscope Hardware Abstraction Layer.
- Parameters
-
Gyro pointer to gyroscope logical sensor
Definition at line 104 of file hal_axis_remap.c.
◆ ApplyMagHAL()
| void ApplyMagHAL | ( | struct MagSensor * | Mag | ) |
Apply the magnetometer Hardware Abstraction Layer.
- Parameters
-
Mag pointer to magnetometer logical sensor
Definition at line 81 of file hal_axis_remap.c.
◆ clearFIFOs()
| void clearFIFOs | ( | SensorFusionGlobals * | sfg | ) |
Function to clear FIFO at the end of each fusion computation.
- Parameters
-
sfg Global data structure pointer
Definition at line 384 of file sensor_fusion.c.
◆ conditionSample()
| void conditionSample | ( | int16_t | sample[3] | ) |
conditionSample ensures that we never encounter the maximum negative two's complement value for a 16-bit variable (-32768).
conditionSample ensures that we never encounter the maximum negative two's complement value for a 16-bit variable (-32768). This value cannot be negated, because the maximum positive value is +32767. We need the ability to negate to gaurantee that subsequent HAL operations can be run successfully.
- Parameters
-
sample 16-bit register value from triaxial sensor read
Definition at line 547 of file sensor_fusion.c.
◆ conditionSensorReadings()
| void conditionSensorReadings | ( | SensorFusionGlobals * | sfg | ) |
conditionSensorReadings() transforms raw software FIFO readings into forms that can be consumed by the sensor fusion engine. This include sample averaging and (in the case of the gyro) integrations, applying hardware abstraction layers, and calibration functions. This function is normally involved via the "sfg." global pointer.
conditionSensorReadings() transforms raw software FIFO readings into forms that can be consumed by the sensor fusion engine. This include sample averaging and (in the case of the gyro) integrations, applying hardware abstraction layers, and calibration functions. This function is normally invoked via the "sfg." global pointer.
- Parameters
-
sfg Global data structure pointer
Definition at line 325 of file sensor_fusion.c.
◆ initSensorFusionGlobals()
| void initSensorFusionGlobals | ( | SensorFusionGlobals * | sfg, |
| struct StatusSubsystem * | pStatusSubsystem, | ||
| struct ControlSubsystem * | pControlSubsystem | ||
| ) |
utility function to insert default values in the top level structure
- Parameters
-
sfg Global data structure pointer pStatusSubsystem Status subsystem pointer pControlSubsystem Control subsystem pointer
Definition at line 56 of file sensor_fusion.c.
◆ zeroArray()
| void zeroArray | ( | struct StatusSubsystem * | pStatus, |
| void * | data, | ||
| uint16_t | size, | ||
| uint16_t | numElements, | ||
| uint8_t | check | ||
| ) |
- Parameters
-
pStatus Status subsystem pointer data pointer to array to be zeroed size data type size = 8, 16 or 32 numElements number of elements to zero out check true if you would like to verify writes, false otherwise
Definition at line 340 of file sensor_fusion.c.
Variable Documentation
◆ ApplyPerturbation
| applyPerturbation_t ApplyPerturbation |
ApplyPerturbation is a reverse unit-step test function.
The ApplyPerturbation function applies a user-specified step function to prior fusion results which is then "released" in the next fusion cycle. When used in conjuction with the NXP Sensor Fusion Toolbox, this provides a visual indication of the dynamic behavior of the library. ApplyPerturbation() is defined in fusion_testing.c.
Definition at line 623 of file sensor_fusion.h.
◆ initializeFusionEngine
| initializeFusionEngine_t initializeFusionEngine |
Definition at line 555 of file sensor_fusion.h.
◆ installSensor
| installSensor_t installSensor |
Definition at line 554 of file sensor_fusion.h.
◆ readSensors
| readSensors_t readSensors |
Definition at line 568 of file sensor_fusion.h.
◆ runFusion
| runFusion_t runFusion |
Definition at line 567 of file sensor_fusion.h.