The top level fusion structure. More...
#include <sensor_fusion.h>
Public Attributes | |
SubsystemPointers | |
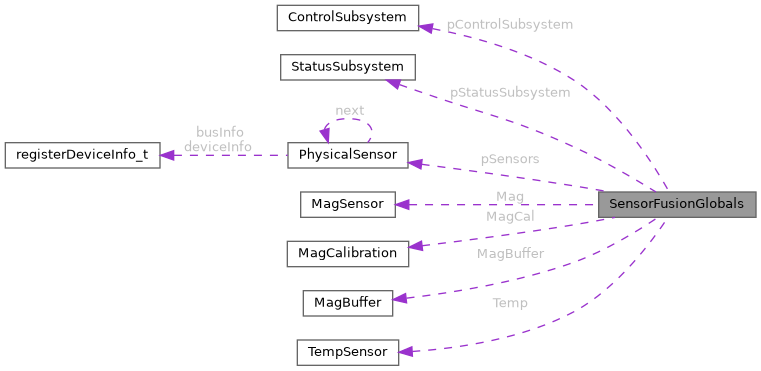
| struct ControlSubsystem * | pControlSubsystem |
| struct StatusSubsystem * | pStatusSubsystem |
MiscFields | |
| uint32_t | iFlags |
| a bit-field of sensors and algorithms used | |
| struct PhysicalSensor * | pSensors |
| a linked list of physical sensors | |
| volatile uint8_t | iPerturbation |
| test perturbation to be applied | |
| int32_t | loopcounter |
| counter incrementing each iteration of sensor fusion (typically 25Hz) | |
| int32_t | systick_I2C |
| systick counter to benchmark I2C reads | |
| int32_t | systick_Spare |
| systick counter for counts spare waiting for timing interrupt | |
SensorRelatedStructures | |
These structures provide homes for sensor readings, as well as various calibration functions. Only those needed for a specific build are included. | |
| struct MagSensor | Mag |
| magnetometer storage | |
| struct MagCalibration | MagCal |
| mag cal storage | |
| struct MagBuffer | MagBuffer |
| mag cal constellation points | |
| struct TempSensor | Temp |
FunctionPointers | |
Function pointers (the SF library external interface) | |
| installSensor_t * | installSensor |
| function for installing a new sensor | |
| initializeFusionEngine_t * | initializeFusionEngine |
| set sensor fusion structures to initial values | |
| applyPerturbation_t * | applyPerturbation |
| apply step function for testing purposes | |
| readSensors_t * | readSensors |
| read all physical sensors | |
| runFusion_t * | runFusion |
| run the fusion routines | |
| conditionSensorReadings_t * | conditionSensorReadings |
| preprocessing step for sensor fusion | |
| clearFIFOs_t * | clearFIFOs |
| clear sensor FIFOs | |
| setStatus_t * | setStatus |
| change status indicator immediately | |
| setStatus_t * | queueStatus |
| queue status change for next regular interval | |
| updateStatus_t * | updateStatus |
| status=next status | |
| updateStatus_t * | testStatus |
| increment to next enumerated status value (test only) | |
| getStatus_t * | getStatus |
| fetch the current status from the Status Subsystem | |
Detailed Description
The top level fusion structure.
The top level fusion structure grows/shrinks based upon flag definitions contained in build.h. These same flags will populate the .iFlags field for run-time access.
Definition at line 460 of file sensor_fusion.h.
Member Data Documentation
◆ applyPerturbation
| applyPerturbation_t* SensorFusionGlobals::applyPerturbation |
apply step function for testing purposes
Definition at line 534 of file sensor_fusion.h.
◆ clearFIFOs
| clearFIFOs_t* SensorFusionGlobals::clearFIFOs |
clear sensor FIFOs
Definition at line 538 of file sensor_fusion.h.
◆ conditionSensorReadings
| conditionSensorReadings_t* SensorFusionGlobals::conditionSensorReadings |
preprocessing step for sensor fusion
Definition at line 537 of file sensor_fusion.h.
◆ getStatus
| getStatus_t* SensorFusionGlobals::getStatus |
fetch the current status from the Status Subsystem
Definition at line 543 of file sensor_fusion.h.
◆ iFlags
| uint32_t SensorFusionGlobals::iFlags |
a bit-field of sensors and algorithms used
Definition at line 473 of file sensor_fusion.h.
◆ initializeFusionEngine
| initializeFusionEngine_t* SensorFusionGlobals::initializeFusionEngine |
set sensor fusion structures to initial values
Definition at line 533 of file sensor_fusion.h.
◆ installSensor
| installSensor_t* SensorFusionGlobals::installSensor |
function for installing a new sensor
Definition at line 532 of file sensor_fusion.h.
◆ iPerturbation
| volatile uint8_t SensorFusionGlobals::iPerturbation |
test perturbation to be applied
Definition at line 475 of file sensor_fusion.h.
◆ loopcounter
| int32_t SensorFusionGlobals::loopcounter |
counter incrementing each iteration of sensor fusion (typically 25Hz)
Definition at line 477 of file sensor_fusion.h.
◆ Mag
| struct MagSensor SensorFusionGlobals::Mag |
magnetometer storage
Definition at line 495 of file sensor_fusion.h.
◆ MagBuffer
| struct MagBuffer SensorFusionGlobals::MagBuffer |
mag cal constellation points
Definition at line 497 of file sensor_fusion.h.
◆ MagCal
| struct MagCalibration SensorFusionGlobals::MagCal |
mag cal storage
Definition at line 496 of file sensor_fusion.h.
◆ pControlSubsystem
| struct ControlSubsystem* SensorFusionGlobals::pControlSubsystem |
Definition at line 468 of file sensor_fusion.h.
◆ pSensors
| struct PhysicalSensor* SensorFusionGlobals::pSensors |
a linked list of physical sensors
Definition at line 474 of file sensor_fusion.h.
◆ pStatusSubsystem
| struct StatusSubsystem* SensorFusionGlobals::pStatusSubsystem |
Definition at line 469 of file sensor_fusion.h.
◆ queueStatus
| setStatus_t* SensorFusionGlobals::queueStatus |
queue status change for next regular interval
Definition at line 540 of file sensor_fusion.h.
◆ readSensors
| readSensors_t* SensorFusionGlobals::readSensors |
read all physical sensors
Definition at line 535 of file sensor_fusion.h.
◆ runFusion
| runFusion_t* SensorFusionGlobals::runFusion |
run the fusion routines
Definition at line 536 of file sensor_fusion.h.
◆ setStatus
| setStatus_t* SensorFusionGlobals::setStatus |
change status indicator immediately
Definition at line 539 of file sensor_fusion.h.
◆ systick_I2C
| int32_t SensorFusionGlobals::systick_I2C |
systick counter to benchmark I2C reads
Definition at line 478 of file sensor_fusion.h.
◆ systick_Spare
| int32_t SensorFusionGlobals::systick_Spare |
systick counter for counts spare waiting for timing interrupt
Definition at line 479 of file sensor_fusion.h.
◆ Temp
| struct TempSensor SensorFusionGlobals::Temp |
Definition at line 502 of file sensor_fusion.h.
◆ testStatus
| updateStatus_t* SensorFusionGlobals::testStatus |
increment to next enumerated status value (test only)
Definition at line 542 of file sensor_fusion.h.
◆ updateStatus
| updateStatus_t* SensorFusionGlobals::updateStatus |
status=next status
Definition at line 541 of file sensor_fusion.h.
The documentation for this struct was generated from the following file:
- src/sensor_fusion/sensor_fusion.h