Defines control sub-system. More...
#include <Arduino.h>#include <HardwareSerial.h>#include "sensor_fusion.h"#include "build.h"#include "control.h"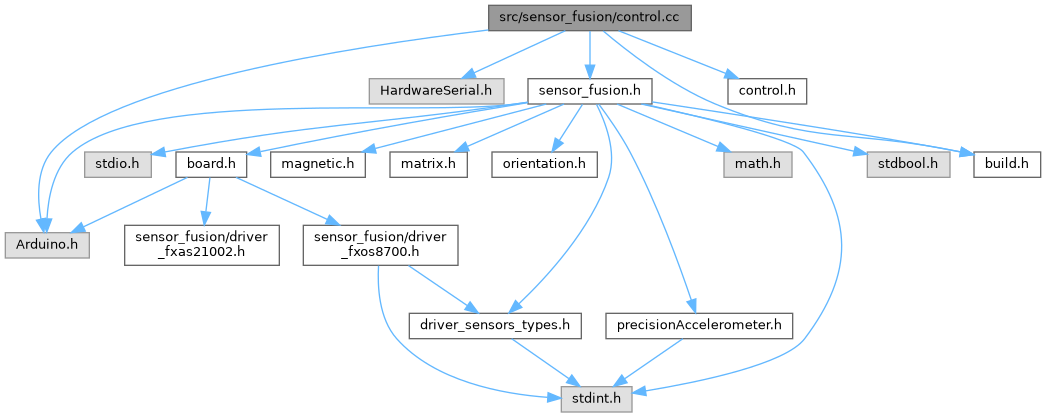
Go to the source code of this file.
Functions | |
| int8_t | SendSerialBytesOut (SensorFusionGlobals *sfg) |
| int8_t | ReceiveIncomingCommands (SensorFusionGlobals *sfg) |
| bool | initializeIOSubsystem (ControlSubsystem *pComm, const void *serial_port, const void *tcp_client) |
| Initialize the control subsystem and all related hardware. | |
| void | UpdateTCPClient (ControlSubsystem *pComm, void *tcp_client) |
Variables | |
| uint8_t | sUARTOutputBuffer [MAX_LEN_SERIAL_OUTPUT_BUF] |
Detailed Description
Defines control sub-system.
Contains methods to output data and receive commands. The physical transport is via either serial UART or WiFi, or both, depending on defines F_USE_WIRED_UART and F_USE_WIRELESS_UART in build.h, and on arguments to initializeIOSubsystem(). The command interpreter is located in control_input.c The streaming functions that format the data into the output are in control_output.c
Definition in file control.cc.
Function Documentation
◆ initializeIOSubsystem()
| bool initializeIOSubsystem | ( | ControlSubsystem * | pComm, |
| const void * | serial_port, | ||
| const void * | tcp_client | ||
| ) |
Initialize the control subsystem and all related hardware.
- Parameters
-
pComm pointer to the control subystem structure
Definition at line 112 of file control.cc.
◆ ReceiveIncomingCommands()
| int8_t ReceiveIncomingCommands | ( | SensorFusionGlobals * | sfg | ) |
Definition at line 87 of file control.cc.
◆ SendSerialBytesOut()
| int8_t SendSerialBytesOut | ( | SensorFusionGlobals * | sfg | ) |
Definition at line 38 of file control.cc.
◆ UpdateTCPClient()
| void UpdateTCPClient | ( | ControlSubsystem * | pComm, |
| void * | tcp_client | ||
| ) |
Definition at line 142 of file control.cc.
Variable Documentation
◆ sUARTOutputBuffer
| uint8_t sUARTOutputBuffer[MAX_LEN_SERIAL_OUTPUT_BUF] |
Definition at line 31 of file control.cc.