Lower level sensor fusion interface. More...
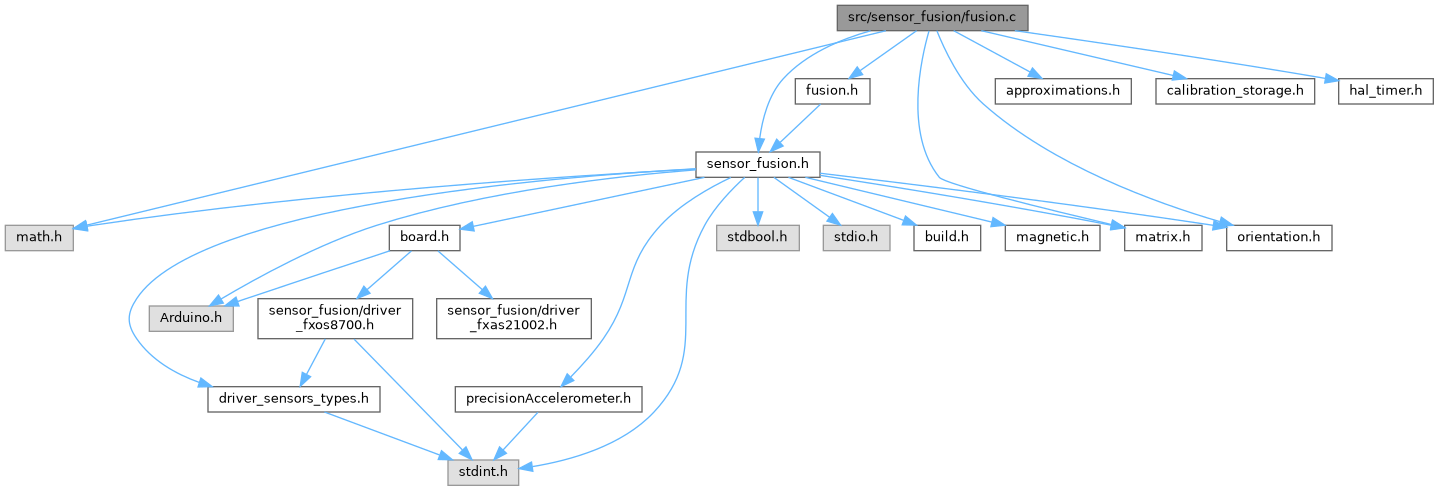
#include <math.h>#include "sensor_fusion.h"#include "approximations.h"#include "calibration_storage.h"#include "fusion.h"#include "hal_timer.h"#include "matrix.h"#include "orientation.h"
Include dependency graph for fusion.c:
Go to the source code of this file.
Functions | |
| void | fInitializeFusion (SensorFusionGlobals *sfg) |
| void | fFuseSensors (struct SV_1DOF_P_BASIC *pthisSV_1DOF_P_BASIC, struct SV_3DOF_G_BASIC *pthisSV_3DOF_G_BASIC, struct SV_3DOF_B_BASIC *pthisSV_3DOF_B_BASIC, struct SV_3DOF_Y_BASIC *pthisSV_3DOF_Y_BASIC, struct SV_6DOF_GB_BASIC *pthisSV_6DOF_GB_BASIC, struct SV_6DOF_GY_KALMAN *pthisSV_6DOF_GY_KALMAN, struct SV_9DOF_GBY_KALMAN *pthisSV_9DOF_GBY_KALMAN, struct AccelSensor *pthisAccel, struct MagSensor *pthisMag, struct GyroSensor *pthisGyro, struct PressureSensor *pthisPressure, struct MagCalibration *pthisMagCal) |
| void | fInit_1DOF_P_BASIC (struct SV_1DOF_P_BASIC *pthisSV, struct PressureSensor *pthisPressure, float flpftimesecs) |
| void | fInit_3DOF_G_BASIC (struct SV_3DOF_G_BASIC *pthisSV, struct AccelSensor *pthisAccel, float flpftimesecs) |
| void | fInit_3DOF_B_BASIC (struct SV_3DOF_B_BASIC *pthisSV, struct MagSensor *pthisMag, float flpftimesecs) |
| void | fInit_3DOF_Y_BASIC (struct SV_3DOF_Y_BASIC *pthisSV) |
| void | fInit_6DOF_GB_BASIC (struct SV_6DOF_GB_BASIC *pthisSV, struct AccelSensor *pthisAccel, struct MagSensor *pthisMag, float flpftimesecs) |
| void | fInit_6DOF_GY_KALMAN (struct SV_6DOF_GY_KALMAN *pthisSV, struct AccelSensor *pthisAccel, struct GyroSensor *pthisGyro) |
| void | fInit_9DOF_GBY_KALMAN (struct SV_9DOF_GBY_KALMAN *pthisSV, struct AccelSensor *pthisAccel, struct MagSensor *pthisMag, struct GyroSensor *pthisGyro, struct MagCalibration *pthisMagCal) |
| void | fRun_1DOF_P_BASIC (struct SV_1DOF_P_BASIC *pthisSV, struct PressureSensor *pthisPressure) |
| void | fRun_3DOF_G_BASIC (struct SV_3DOF_G_BASIC *pthisSV, struct AccelSensor *pthisAccel) |
| void | fRun_3DOF_B_BASIC (struct SV_3DOF_B_BASIC *pthisSV, struct MagSensor *pthisMag) |
| void | fRun_3DOF_Y_BASIC (struct SV_3DOF_Y_BASIC *pthisSV, struct GyroSensor *pthisGyro) |
| void | fRun_6DOF_GB_BASIC (struct SV_6DOF_GB_BASIC *pthisSV, struct MagSensor *pthisMag, struct AccelSensor *pthisAccel) |
| void | fRun_6DOF_GY_KALMAN (struct SV_6DOF_GY_KALMAN *pthisSV, struct AccelSensor *pthisAccel, struct GyroSensor *pthisGyro) |
Detailed Description
Lower level sensor fusion interface.
Definition in file fusion.c.
Function Documentation
◆ fFuseSensors()
| void fFuseSensors | ( | struct SV_1DOF_P_BASIC * | pthisSV_1DOF_P_BASIC, |
| struct SV_3DOF_G_BASIC * | pthisSV_3DOF_G_BASIC, | ||
| struct SV_3DOF_B_BASIC * | pthisSV_3DOF_B_BASIC, | ||
| struct SV_3DOF_Y_BASIC * | pthisSV_3DOF_Y_BASIC, | ||
| struct SV_6DOF_GB_BASIC * | pthisSV_6DOF_GB_BASIC, | ||
| struct SV_6DOF_GY_KALMAN * | pthisSV_6DOF_GY_KALMAN, | ||
| struct SV_9DOF_GBY_KALMAN * | pthisSV_9DOF_GBY_KALMAN, | ||
| struct AccelSensor * | pthisAccel, | ||
| struct MagSensor * | pthisMag, | ||
| struct GyroSensor * | pthisGyro, | ||
| struct PressureSensor * | pthisPressure, | ||
| struct MagCalibration * | pthisMagCal | ||
| ) |
◆ fInit_1DOF_P_BASIC()
| void fInit_1DOF_P_BASIC | ( | struct SV_1DOF_P_BASIC * | pthisSV, |
| struct PressureSensor * | pthisPressure, | ||
| float | flpftimesecs | ||
| ) |
◆ fInit_3DOF_B_BASIC()
| void fInit_3DOF_B_BASIC | ( | struct SV_3DOF_B_BASIC * | pthisSV, |
| struct MagSensor * | pthisMag, | ||
| float | flpftimesecs | ||
| ) |
◆ fInit_3DOF_G_BASIC()
| void fInit_3DOF_G_BASIC | ( | struct SV_3DOF_G_BASIC * | pthisSV, |
| struct AccelSensor * | pthisAccel, | ||
| float | flpftimesecs | ||
| ) |
◆ fInit_3DOF_Y_BASIC()
| void fInit_3DOF_Y_BASIC | ( | struct SV_3DOF_Y_BASIC * | pthisSV | ) |
◆ fInit_6DOF_GB_BASIC()
| void fInit_6DOF_GB_BASIC | ( | struct SV_6DOF_GB_BASIC * | pthisSV, |
| struct AccelSensor * | pthisAccel, | ||
| struct MagSensor * | pthisMag, | ||
| float | flpftimesecs | ||
| ) |
◆ fInit_6DOF_GY_KALMAN()
| void fInit_6DOF_GY_KALMAN | ( | struct SV_6DOF_GY_KALMAN * | pthisSV, |
| struct AccelSensor * | pthisAccel, | ||
| struct GyroSensor * | pthisGyro | ||
| ) |
◆ fInit_9DOF_GBY_KALMAN()
| void fInit_9DOF_GBY_KALMAN | ( | struct SV_9DOF_GBY_KALMAN * | pthisSV, |
| struct AccelSensor * | pthisAccel, | ||
| struct MagSensor * | pthisMag, | ||
| struct GyroSensor * | pthisGyro, | ||
| struct MagCalibration * | pthisMagCal | ||
| ) |
◆ fInitializeFusion()
| void fInitializeFusion | ( | SensorFusionGlobals * | sfg | ) |
◆ fRun_1DOF_P_BASIC()
| void fRun_1DOF_P_BASIC | ( | struct SV_1DOF_P_BASIC * | pthisSV, |
| struct PressureSensor * | pthisPressure | ||
| ) |
◆ fRun_3DOF_B_BASIC()
| void fRun_3DOF_B_BASIC | ( | struct SV_3DOF_B_BASIC * | pthisSV, |
| struct MagSensor * | pthisMag | ||
| ) |
◆ fRun_3DOF_G_BASIC()
| void fRun_3DOF_G_BASIC | ( | struct SV_3DOF_G_BASIC * | pthisSV, |
| struct AccelSensor * | pthisAccel | ||
| ) |
◆ fRun_3DOF_Y_BASIC()
| void fRun_3DOF_Y_BASIC | ( | struct SV_3DOF_Y_BASIC * | pthisSV, |
| struct GyroSensor * | pthisGyro | ||
| ) |
◆ fRun_6DOF_GB_BASIC()
| void fRun_6DOF_GB_BASIC | ( | struct SV_6DOF_GB_BASIC * | pthisSV, |
| struct MagSensor * | pthisMag, | ||
| struct AccelSensor * | pthisAccel | ||
| ) |
◆ fRun_6DOF_GY_KALMAN()
| void fRun_6DOF_GY_KALMAN | ( | struct SV_6DOF_GY_KALMAN * | pthisSV, |
| struct AccelSensor * | pthisAccel, | ||
| struct GyroSensor * | pthisGyro | ||
| ) |